生成对抗网络GAN由生成器和判别器两部分组成
判别器是常规的神经网络分类器,一半时间判别器接收来自训练数据中的真实图像,另一半时间收到来自生成器中的虚假图像。训练判别器使得对于真实图像,它输出的概率值接近1,而对于虚假图像则接近0
生成器与判别器正好相反,通过训练,它输出判别器赋值概率接近1的图像。生成器需要产生更加真实的输出,从而欺骗判别器
在GAN中要同时使用两个优化器,分别用来最小化判别器和生成器的损失
Batch Normalization
Batch Normalization是DCGAN(Deep Covolutional GAN)中常用的技术,它可以使网络训练得更快,允许更大的学习率,使更多的激活函数变得有效,并且使得参数更易初始化
BN一般用于激活函数使用之前,对每个输出节点,记第个训练样本在该节点的输出为,批次均值,批次方差
则,是一个很小的正值(例如0.001),BN的输出为,和均为可训练参数
同时用和更新总体的均值和方差,总体均值和方差在检验网络和进行预测时使用,和,和的初始值为0和1,可取为0.99
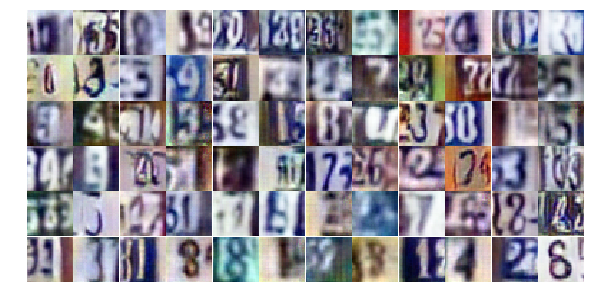
DCGAN应用示例
使用的数据集为the Street View House Numbers(SVHN) dataset
- 数据处理
import pickle as pkl import matplotlib.pyplot as plt import numpy as np from scipy.io import loadmat import tensorflow as tf ### 读取数据 data_dir = 'data/' trainset = loadmat(data_dir + 'svhntrain_32x32.mat') testset = loadmat(data_dir + 'svhntest_32x32.mat') #the same scale as tanh activation function def scale(x, feature_range=(-1, 1)): # scale to (0, 1) x = ((x - x.min())/(255 - x.min())) # scale to feature_range min, max = feature_range x = x * (max - min) + min return x ### 数据准备 class Dataset: def __init__(self, train, test, val_frac=0.5, shuffle=False, scale_func=None): split_idx = int(len(test['y'])*(1 - val_frac)) self.test_x, self.valid_x = test['X'][:,:,:,:split_idx], test['X'][:,:,:,split_idx:] self.test_y, self.valid_y = test['y'][:split_idx], test['y'][split_idx:] self.train_x, self.train_y = train['X'], train['y'] ###(32,32,3,:) to (:,32,32,3) self.train_x = np.rollaxis(self.train_x, 3) self.valid_x = np.rollaxis(self.valid_x, 3) self.test_x = np.rollaxis(self.test_x, 3) if scale_func is None: self.scaler = scale else: self.scaler = scale_func self.shuffle = shuffle def batches(self, batch_size): if self.shuffle: idx = np.arange(len(self.train_x)) np.random.shuffle(idx) self.train_x = self.train_x[idx] self.train_y = self.train_y[idx] n_batches = len(self.train_y)//batch_size for ii in range(0, len(self.train_y), batch_size): x = self.train_x[ii:ii+batch_size] y = self.train_y[ii:ii+batch_size] yield self.scaler(x), y ### 创建数据集 dataset = Dataset(trainset, testset) - 搭建网络
### Input def model_inputs(real_dim, z_dim): inputs_real = tf.placeholder(tf.float32, (None, *real_dim), name='input_real') inputs_z = tf.placeholder(tf.float32, (None, z_dim), name='input_z') return inputs_real, inputs_z ### Generator def generator(z, output_dim, reuse=False, alpha=0.2, training=True): with tf.variable_scope('generator', reuse=reuse): x1 = tf.layers.dense(z, 4*4*512) #First fully connected layer x1 = tf.reshape(x1, (-1, 4, 4, 512)) #Reshape it to start the convolutional stack x1 = tf.layers.batch_normalization(x1, training=training) x1 = tf.maximum(alpha * x1, x1) #leaky relu, 4x4x512 now # transpose convolution > batch norm > leaky ReLU x2 = tf.layers.conv2d_transpose(x1, 256, 5, strides=2, padding='same') #with zero padding x2 = tf.layers.batch_normalization(x2, training=training) x2 = tf.maximum(alpha * x2, x2) #8x8x256 now # transpose convolution > batch norm > leaky ReLU x3 = tf.layers.conv2d_transpose(x2, 128, 5, strides=2, padding='same') x3 = tf.layers.batch_normalization(x3, training=training) x3 = tf.maximum(alpha * x3, x3) #16x16x128 now # output layer logits = tf.layers.conv2d_transpose(x3, output_dim, 5, strides=2, padding='same') #32x32x3 now out = tf.tanh(logits) return out ### Discriminator def discriminator(x, reuse=False, training=True, alpha=0.2): with tf.variable_scope('discriminator', reuse=reuse): x1 = tf.layers.conv2d(x, 64, 5, strides=2, padding='same') #Input layer is 32x32x3 relu1 = tf.maximum(alpha * x1, x1) #16x16x64 # convolution > batch norm > leaky ReLU x2 = tf.layers.conv2d(relu1, 128, 5, strides=2, padding='same') bn2 = tf.layers.batch_normalization(x2, training=training) relu2 = tf.maximum(alpha * bn2, bn2) #8x8x128 # convolution > batch norm > leaky ReLU x3 = tf.layers.conv2d(relu2, 256, 5, strides=2, padding='same') bn3 = tf.layers.batch_normalization(x3, training=training) relu3 = tf.maximum(alpha * bn3, bn3) #4x4x256 # Flatten it flat = tf.reshape(relu3, (-1, 4*4*256)) logits = tf.layers.dense(flat, 1) out = tf.sigmoid(logits) return out, logits ### Create GAN and Compute Model Loss ### input_real: Images from the real dataset ### input_z: Z input(noise) ### out_channel_dim: The number of channels in the output image def model_loss(input_real, input_z, output_dim, training=True, alpha=0.2, smooth=0.1): g_model = generator(input_z, output_dim, alpha=alpha, training=training) d_model_real, d_logits_real = discriminator(input_real, training=training, alpha=alpha) # reuse=True: reuse the variables instead of creating new ones if we build the graph again d_model_fake, d_logits_fake = discriminator(g_model, reuse=True, training=training, alpha=alpha) # real and fake loss d_loss_real = tf.nn.sigmoid_cross_entropy_with_logits(logits=d_logits_real, labels=tf.ones_like(d_model_real)*(1-smooth)) #label smoothing d_loss_real = tf.reduce_mean(d_loss_real) d_loss_fake = tf.nn.sigmoid_cross_entropy_with_logits(logits=d_logits_fake, labels=tf.zeros_like(d_model_fake)) d_loss_fake = tf.reduce_mean(d_loss_fake) ### discriminator and generator loss d_loss = d_loss_real + d_loss_fake g_loss = tf.nn.sigmoid_cross_entropy_with_logits(logits=d_logits_fake, labels=tf.ones_like(d_model_fake)) g_loss = tf.reduce_mean(g_loss) return d_loss, g_loss, g_model ### Optimizer ### beta1: The exponential decay rate for the 1st moment in the optimizer def model_opt(d_loss, g_loss, learning_rate, beta1): # Get weights and bias to update t_vars = tf.trainable_variables() d_vars = [var for var in t_vars if var.name.startswith('discriminator')] g_vars = [var for var in t_vars if var.name.startswith('generator')] # Optimize with tf.control_dependencies(tf.get_collection(tf.GraphKeys.UPDATE_OPS)): #update population mean and variance d_train_opt = tf.train.AdamOptimizer(learning_rate, beta1=beta1).minimize(d_loss, var_list=d_vars) g_train_opt = tf.train.AdamOptimizer(learning_rate, beta1=beta1).minimize(g_loss, var_list=g_vars) return d_train_opt, g_train_opt ### Final GAN class GAN: def __init__(self, real_size, z_size, learning_rate, alpha=0.2, smooth=0.1, beta1=0.5): tf.reset_default_graph() self.input_real, self.input_z = model_inputs(real_size, z_size) self.training = tf.placeholder_with_default(True, (), "train_status") self.d_loss, self.g_loss, self.samples = model_loss(self.input_real, self.input_z, real_size[2], \ training=self.training, alpha=alpha, smooth=smooth) self.d_opt, self.g_opt = model_opt(self.d_loss, self.g_loss, learning_rate, beta1) - 训练网络
def train(net, dataset, epochs, batch_size, print_every=10, show_every=100): saver = tf.train.Saver() sample_z = np.random.uniform(-1, 1, size=(72, z_size)) #samples for generator to generate(for plotting) samples, losses = [], [] steps = 0 with tf.Session() as sess: sess.run(tf.global_variables_initializer()) for e in range(epochs): for x, y in dataset.batches(batch_size): steps += 1 ### sample random noise for Generator batch_z = np.random.uniform(-1, 1, size=(batch_size, z_size)) ### run optimizers _, _ = sess.run([net.d_opt, net.g_opt], feed_dict={net.input_real:x, net.input_z:batch_z}) ### get the losses and print them out if steps % print_every == 0: train_loss_d = net.d_loss.eval({net.input_z: batch_z, net.input_real: x}) train_loss_g = net.g_loss.eval({net.input_z: batch_z}) print("Epoch {}/{}...".format(e+1, epochs), \ "Discriminator Loss: {:.4f}...".format(train_loss_d), \ "Generator Loss: {:.4f}".format(train_loss_g)) losses.append((train_loss_d, train_loss_g)) #save losses to view after training ### save generated samples if steps % show_every == 0: # training=False: the batch normalization layers will use the population statistics rather than the batch statistics gen_samples = sess.run(net.samples, feed_dict={net.input_z: sample_z, net.training: False}) samples.append(gen_samples) saver.save(sess, './checkpoints/generator.ckpt') with open('samples.pkl', 'wb') as f: pkl.dump(samples, f) return losses, samples - 最终结果并可视化
### Hyperparameters real_size = (32,32,3) z_size = 100 learning_rate = 0.0002 batch_size = 128 epochs = 25 alpha = 0.2 smooth = 0.1 beta1 = 0.5 ### Create and Train the network net = GAN(real_size, z_size, learning_rate, alpha=alpha, smooth=smooth, beta1=beta1) losses, samples = train(net, dataset, epochs, batch_size) ### Visualize def view_samples(sample, nrows, ncols, figsize=(5,5)): #the number of the sample=nrows*ncols fig, axes = plt.subplots(figsize=figsize, nrows=nrows, ncols=ncols, sharey=True, sharex=True) for ax, img in zip(axes.flatten(), sample): ax.axis('off') img = ((img - img.min())*255 / (img.max() - img.min())).astype(np.uint8) ax.set_adjustable('box-forced') im = ax.imshow(img, aspect='equal') plt.subplots_adjust(wspace=0, hspace=0) return fig, axes view_samples(samples[-1], 6, 12, figsize=(10,5))